
Bouwverslag van de GEPRC MX3 Sparrow quadcopter
Wanneer ik een drone in elkaar zet, zeker in de begindagen, keek ik veel naar bouwverslagen. Waar loopt iemand tegen aan, waar moet je rekening mee houden en welke onderdelen heb je nodig zijn bijvoorbeeld vragen waarop ik een antwoord probeerde te vinden. Vandaag doe ik ook een duit in het zakje met zowel een in het Nederlands geschreven bouwverslag als een videoverslag in het Engels. Het verslag betreft het in elkaar zetten van de GEPRC GEP-MX3 Sparrow quadcopter met zelf bij elkaar gezochte onderdelen.
https://www.youtube.com/watch?v=FiJjzmSA1D0
Frame uitkiezen
Wanneer je een drone gaat bouwen heb je de keuze uit tal van verschillende frames, eigenlijk het skelet van de quadcopter. Frames zijn er in verschillende materialen, grootten, dikten en afwerkingen. En mijn advies hier is, koop een frame wat je mooi vind en niet al te duur is. Op deze manier ga je waarschijnlijk zuiniger met je quadcopter om en mocht het stuk gaan, dan kun je je frame of onderdelen hiervan goedkoop vervangen.
Zelf heb ik gekozen voor een GEPRC GEP-MX3 Sparrow frame. Dit is een unibody carbon frame, meet 120 x 120mm, heeft een wielbasis van 139mm en is 3mm dik. Naast het carbon is ook de aluminium rolkooi onderdeel van het frame. Deze twee onderdelen samen wegen 39 gram. De keuze voor dit frame heeft voornamelijk met het design van het model te maken. Daarnaast staat GEPRC er om bekend kwalitatief hoogwaardige frames te maken voor niet al te veel geld.
Wanneer je je eerste drone gaat bouwen, wil ik je graag adviseren om eerst een kleine aan te schaffen of te bouwen. Onderdelen hiervoor zijn veelal goedkoper en de drone is minder gevaarlijk voor de omgeving. Oefen vooral ook eerst op een simulator zoals LiftOff, FPV Freerider of Velocidrone.
Motoren
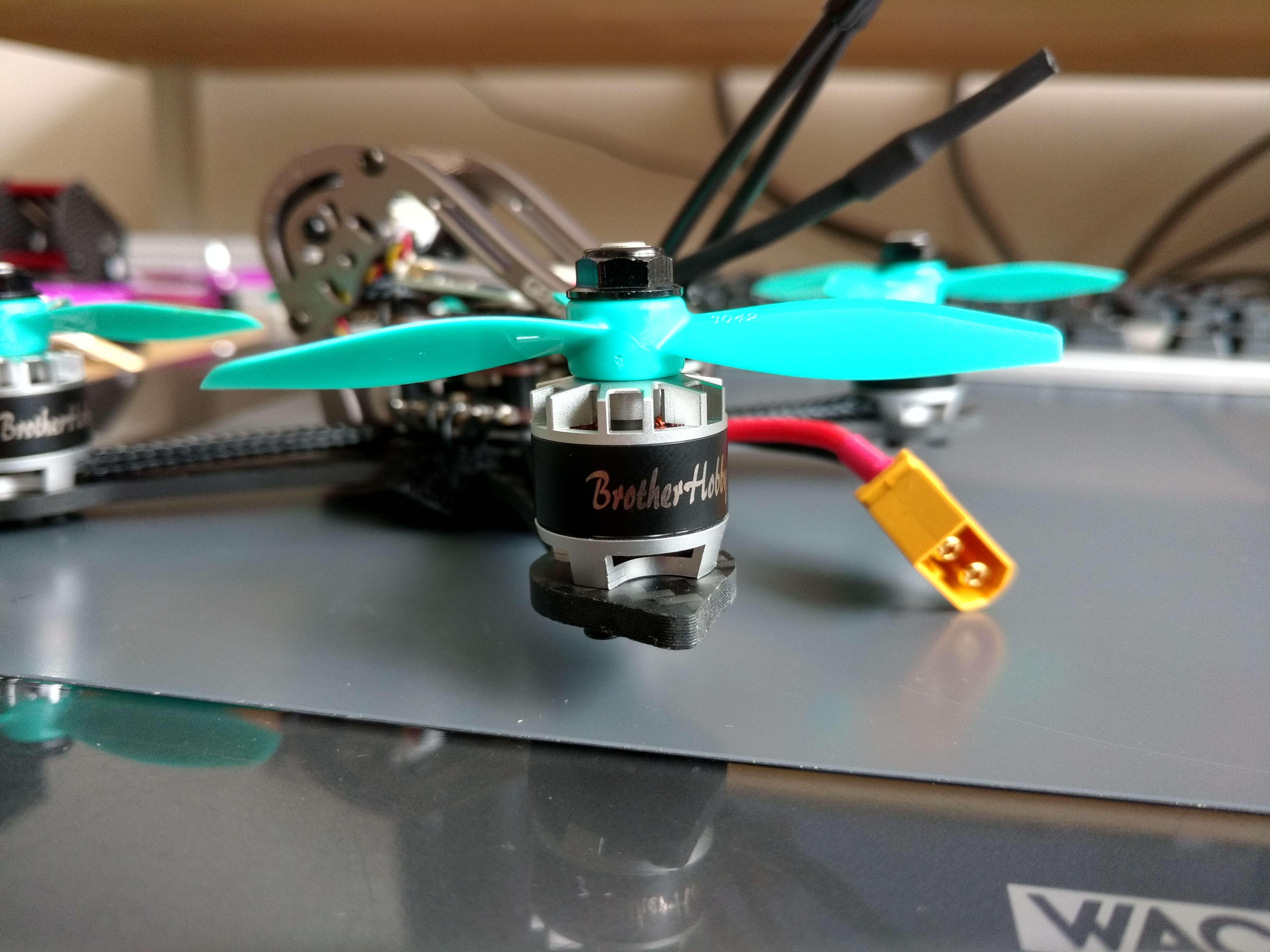
Een BrotherHobby 1407 Tornado motor met een prop erop.
Het eerste wat ik eigenlijk altijd doe is de motoren op het frame vast zetten. Op deze manier krijg je direct een indruk van hoeveel centimeter draad je nodig gaat hebben om ze op de ESC's aan te sluiten. Zelf had ik nog vier 1407 BrotherHobby Tornado's van 3600kV liggen, deze passen qua capaciteit prima op dit model.
Wel heb ik vernomen dat de openstaande luchtinlaten, makkelijk beschadigd kunnen raken. Misschien handig om daarom naar een ander model motor te kijken. GEPRC bied deze quadcopter ook kant en klaar aan, met daarop hun eigen SpeedX GR1408 motoren in de 3750kV variant. De prijs van deze motoren is gelijk en bij de SpeedX modellen heb je een iets hogere stator.

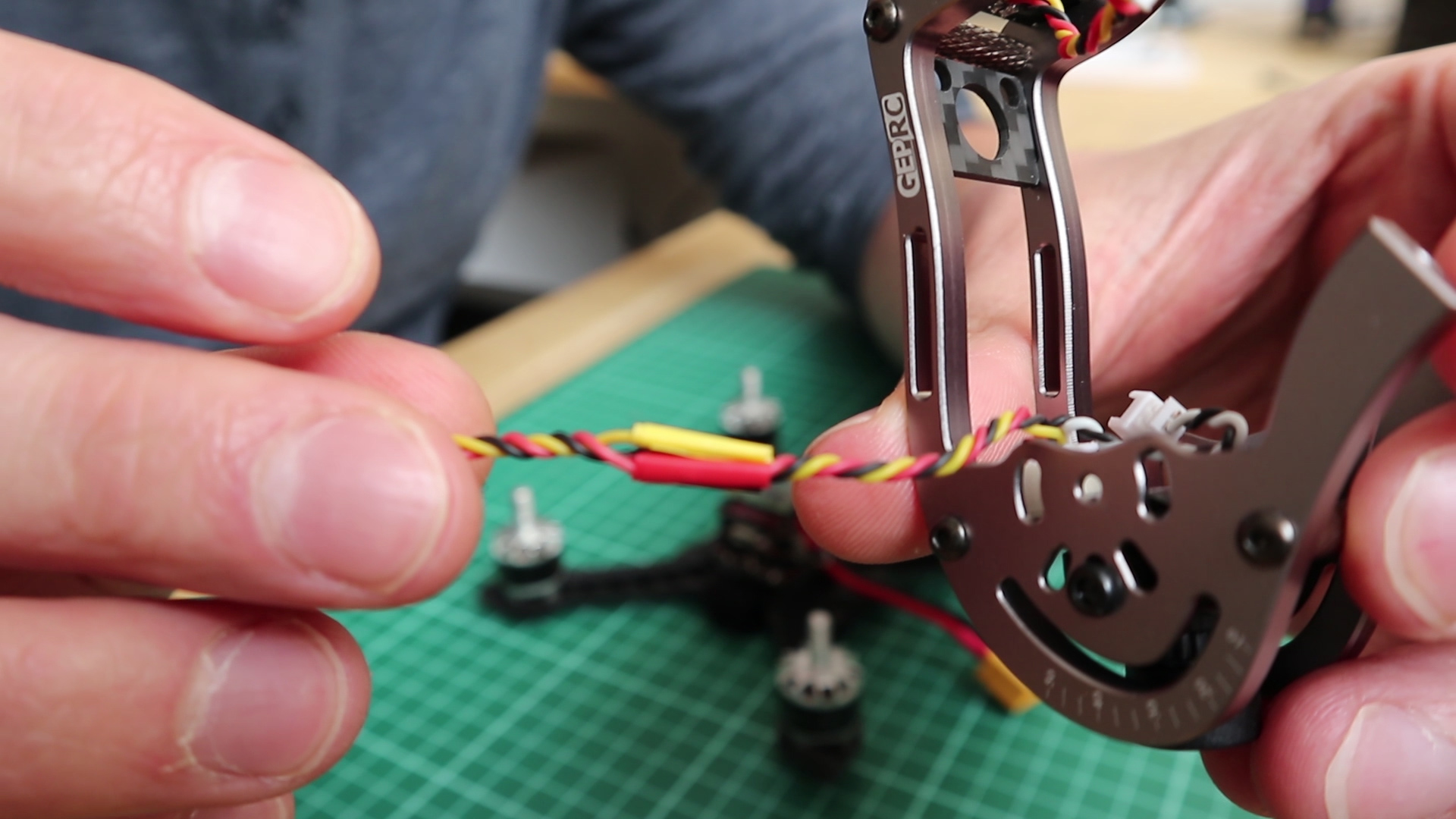
Na het afknippen van een stuk gevlochten draad, brand ik de einden dicht. Dit voorkomt "pluizen".
Om de quadcopter strakker te laten ogen en om de draden te beschermen, maak ik gebruik van mesh wire. Voordat ik de motorkabels op de ESC aansluit knip ik een stuk van ongeveer acht centimeter lang, per motor af. Schuif de motor draden vervolgens recht door het stuk gevlochten draad.
Als de rolkooi eenmaal is gemonteerd kunnen de draden nergens meer heen en zijn ze volledig beschermd. Ook is het niet nodig om de draden middels een tie-wrap of met isolatietape aan het frame vast te maken. Dit maakt de algehele uitstraling van de quadcopter fantastisch!
GEPRC Stable stack installeren
De Stable stack van GEPRC is een mooi pakketje aan elektronica waaraan je maar weinig hoeft te doen. De drie bordjes klikken middels een connector aan elkaar en is daarna praktisch al operationeel. Ook is er een online handleiding waarin wordt beschreven welke connector waarbij hoort, hoe de VTX werkt et cetera. Echter wordt niet aangegeven hoe je de stack het beste kan monteren op je frame.
Gelukkig wordt deze quadcopter ook als RTF aangeboden. Middels de bijbehorende foto's van de RTF, ben ik er achter gekomen dat er gebruik gemaakt wordt van een plastic plaatje. Met dit plaatje wordt de Stable stack "zacht" gemonteerd. In het Engels wordt dit "soft mount" genoemd. Dit wordt gedaan om trillingen en vibraties die tijdens het vliegen ontstaan op te vangen. Op deze manier kunnen de vliegeigenschappen aanzienlijk verbeteren.
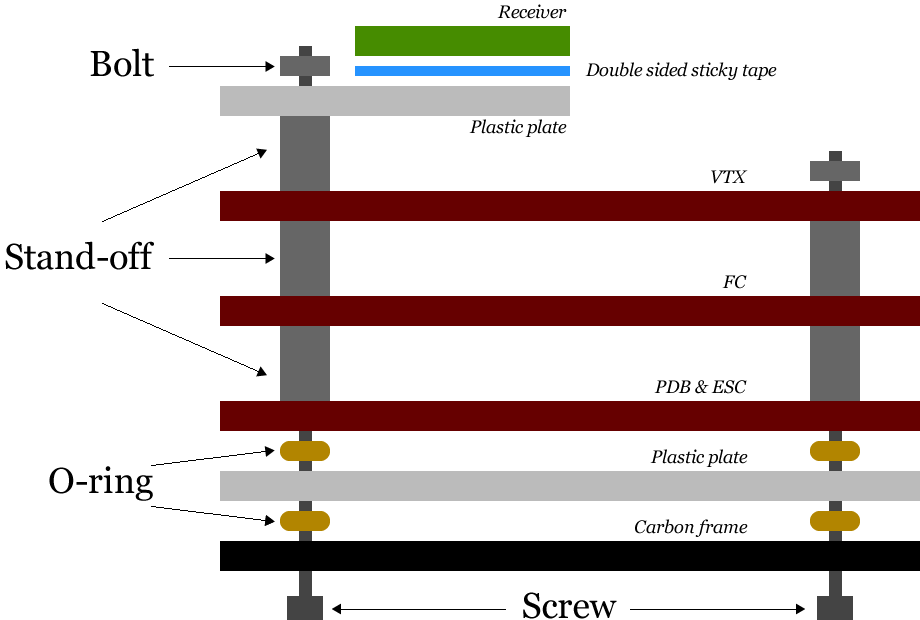
Zijaanzicht van de GEPRC Stable stack en hoe deze af fabriek in de RTF variant is geplaatst.
In eerste instantie heb ik dit voorbeeld volledig gevolgd en de motordraden aan de ESC's gesoldeerd. Echter kwam ik er achter dat ik de batterijband (battery strap) niet meer tussen het frame en het plastic plaatje kwijt kon. Hier lopen namelijk mijn motorkabels tussendoor richting de ESC's.
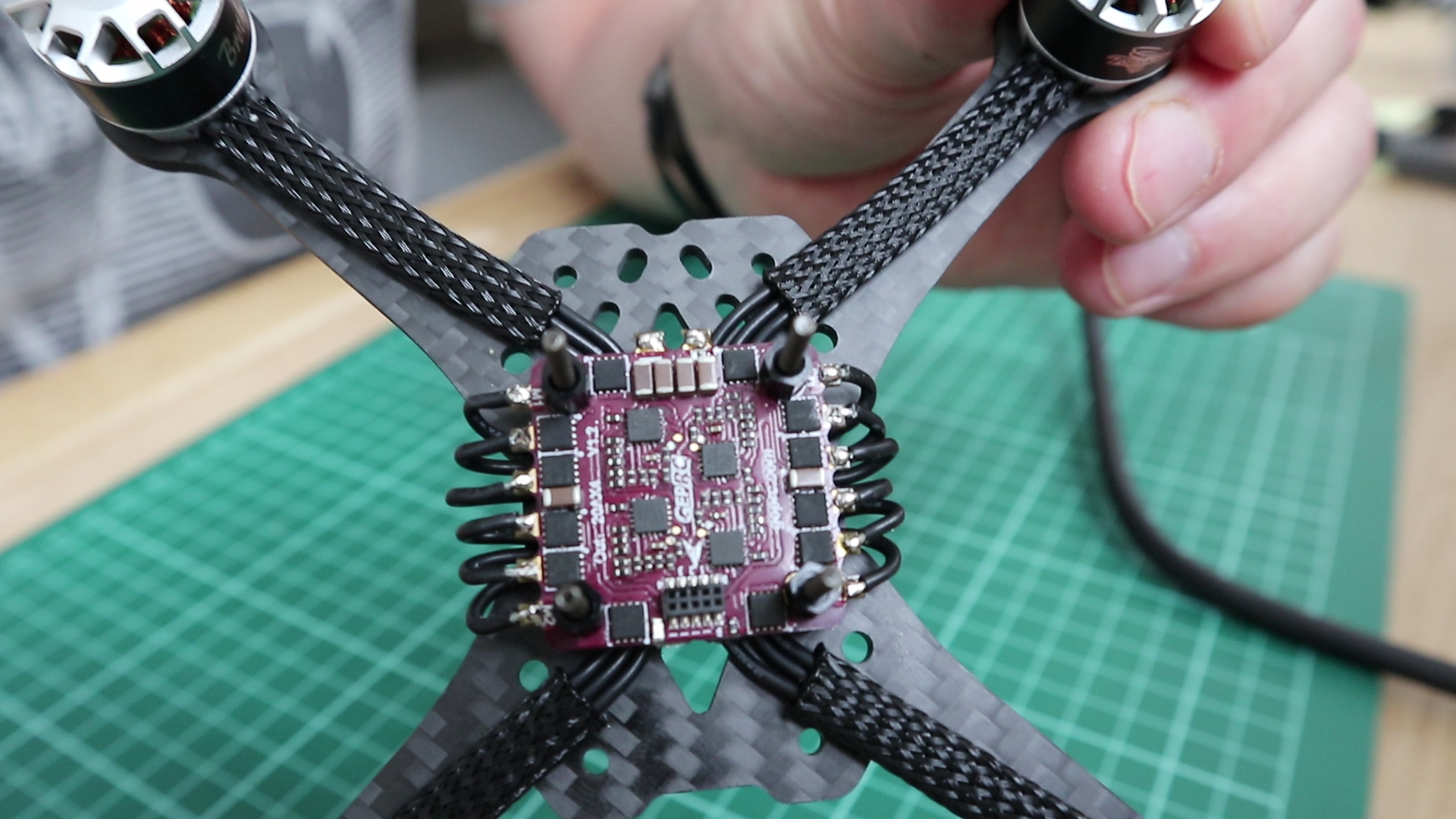
Alle motoren zijn op de vier-in-één 20A ESC gesoldeerd.
Hoe monteer ik de Stable stack
Op zich geen probleem zou je denken want je kan ze ook tussen de PDB & ESC en het plastic plaatje kwijt. Maar dit lukt niet omdat de componenten van de PDB & ESC naar onderen toe ook ruimte innemen. Ik heb de stack weer los gemaakt en aan de onderzijde een twee plastic plaatje toegevoegd. Wat er als volgt uitziet:
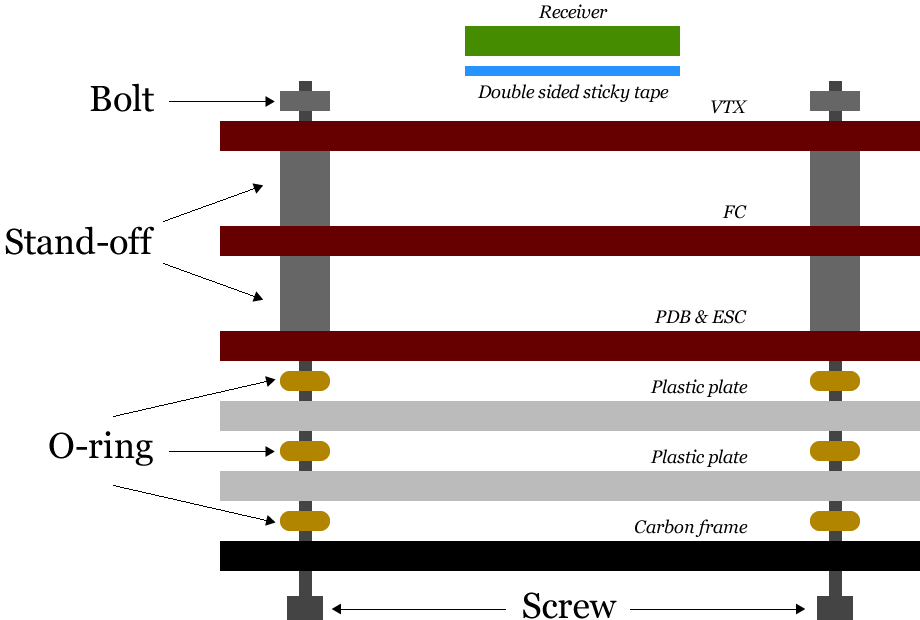
Mijn persoonlijke manier om de Stable stack te monteren.
Op deze manier kan ik de batterijband tussen het carbon frame en het eerste plastic plaatje kwijt. Zo lopen de motorkabels tussen de twee plastic plaatjes door en zo heeft de PDB & ESC combinatie een veilige ruimte aan de onderzijde.
Dit heeft natuurlijk een keerzijde want de gehele stack wordt een stukje hoger. Hierdoor is het moeilijker om de receiver op een plastic plaatje te monteren, want het steekt boven de rolkooi uit. En je bent hierdoor genoodzaakt om de receiver op de VTX te plakken, nu hopen dat het niet te warm wordt. Ook zit de batterijband dusdanig strak, dat wanneer je het wilt vervangen, je je stack los moet draaien om de band er uit te kunnen trekken.
Amass XT-60U-M connector voor power!
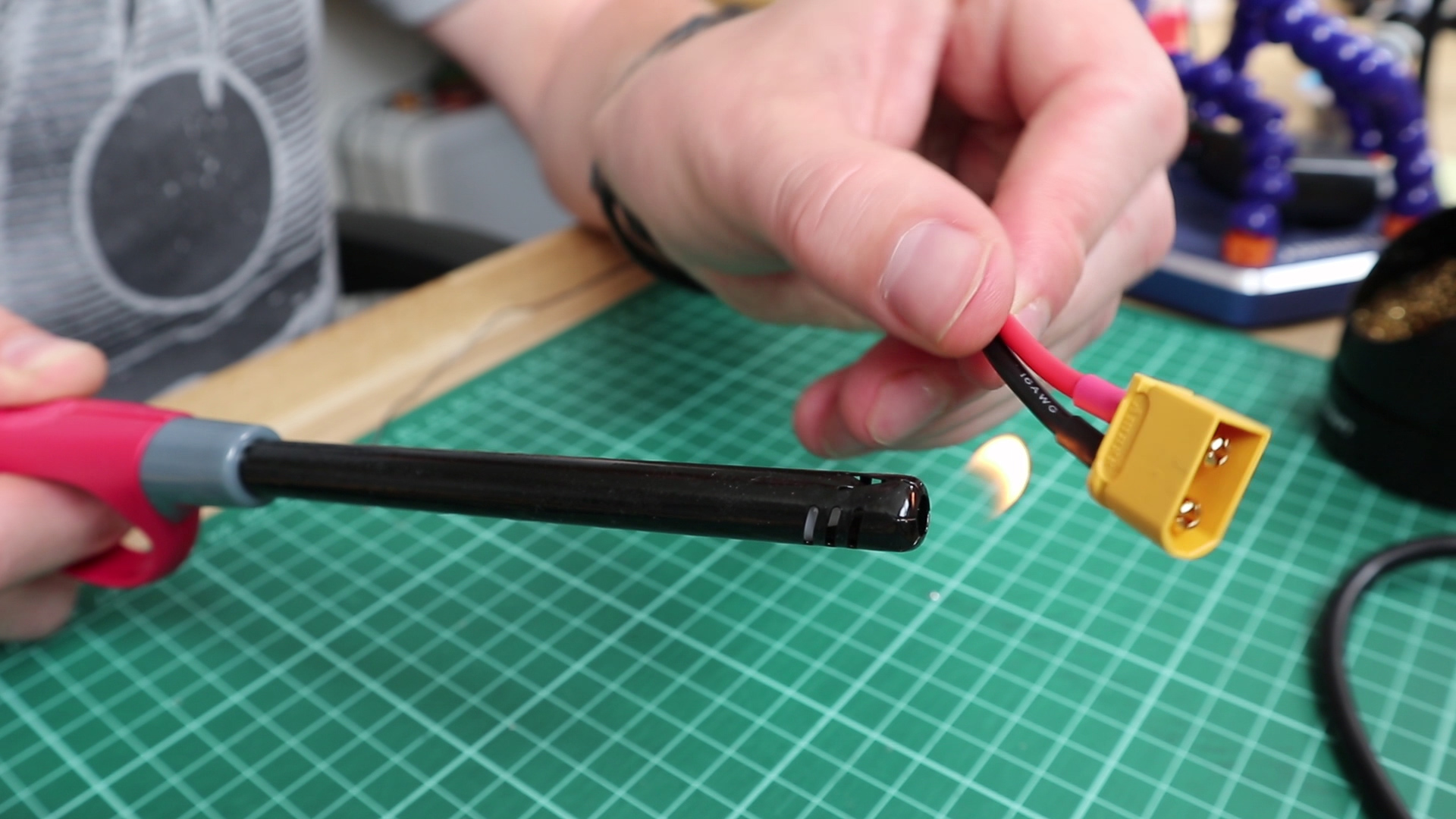
De krimpkous om de connectoren laten krimpen.
In het land van stroomvoorziening bij drones maak je vanaf drie inch modellen gebruik van een XT-30, XT-60 of XT-90 connector. De 30 variant is hierbij de kleinste en de 90 variant de grootste. De batterijen die ik wil gebruiken heb ik al in huis, en zijn voorzien van XT-60 connectoren. Logischerwijs soldeer ik daarom een XT-60 connector met 16AWG draad op de PDB.
De precieze connector die ik gebruik is de XT-60U-M van Amass. Amass is het bedrijf dat dit type connector heeft bedacht en gemaakt. Inmiddels zijn er veel kopieën van deze connectoren gemaakt. Deze kopieën hebben als nadeel dat ze kwalitatief minder goed kunnen zijn, en kunnen smelten bij hogere doorvoer temperaturen.
Er wordt in het pakketje ook een 25V 330uF condensator meegeleverd. Vooralsnog ga ik deze niet gebruiken omdat er in het frame weinig ruimte over is gebleven.
Vluchtregelaar ofwel flightcontroller
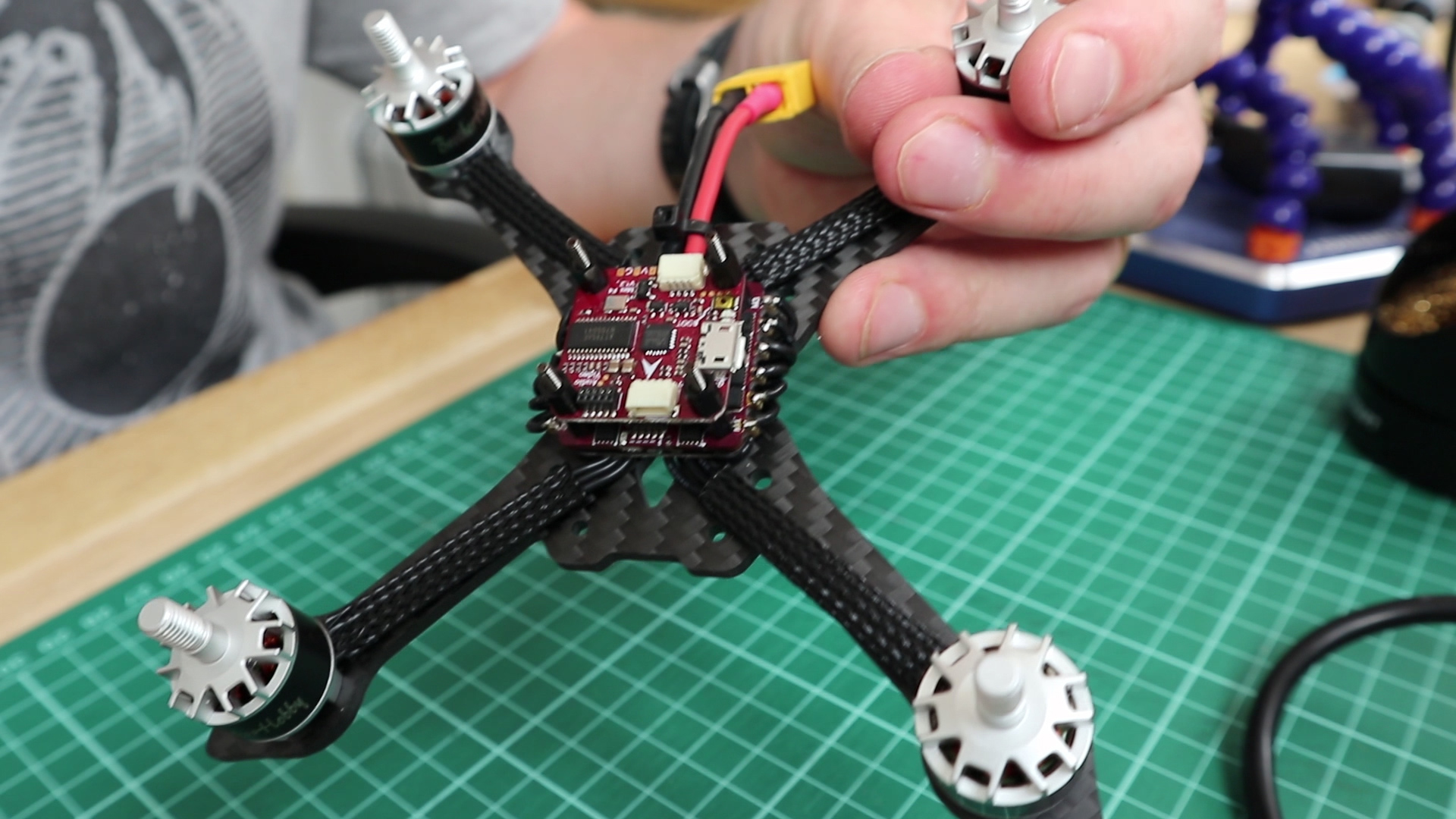
De vluchtregelaar is inmiddels ook helemaal gereed!
Wanneer het soldeerwerk gereed is ziet de quadcopter er erg strak uit. De volgende stap die genomen moet worden is het plaatsen van de vluchtcontroller. Het daadwerkelijke brein van de quadcopter. Met de Stable stack gaat dit erg eenvoudig, want je klikt het er zo op.
De vluchtcontroller zelf heeft een F4 chip aan boord, wat betekent dat er gerekend kan worden met 8K. Ook bied de controller signaal doorvoer mogelijkheden tot en met Dshot 600.
Een OSD is ook aanwezig om je PID's aan te passen. Deze kun je volledig instellen in BetaFlight. Als je aan het vliegen bent en je wilt je PID's aanpassen, dan kun je deze benaderen door de volgende stick combinatie:
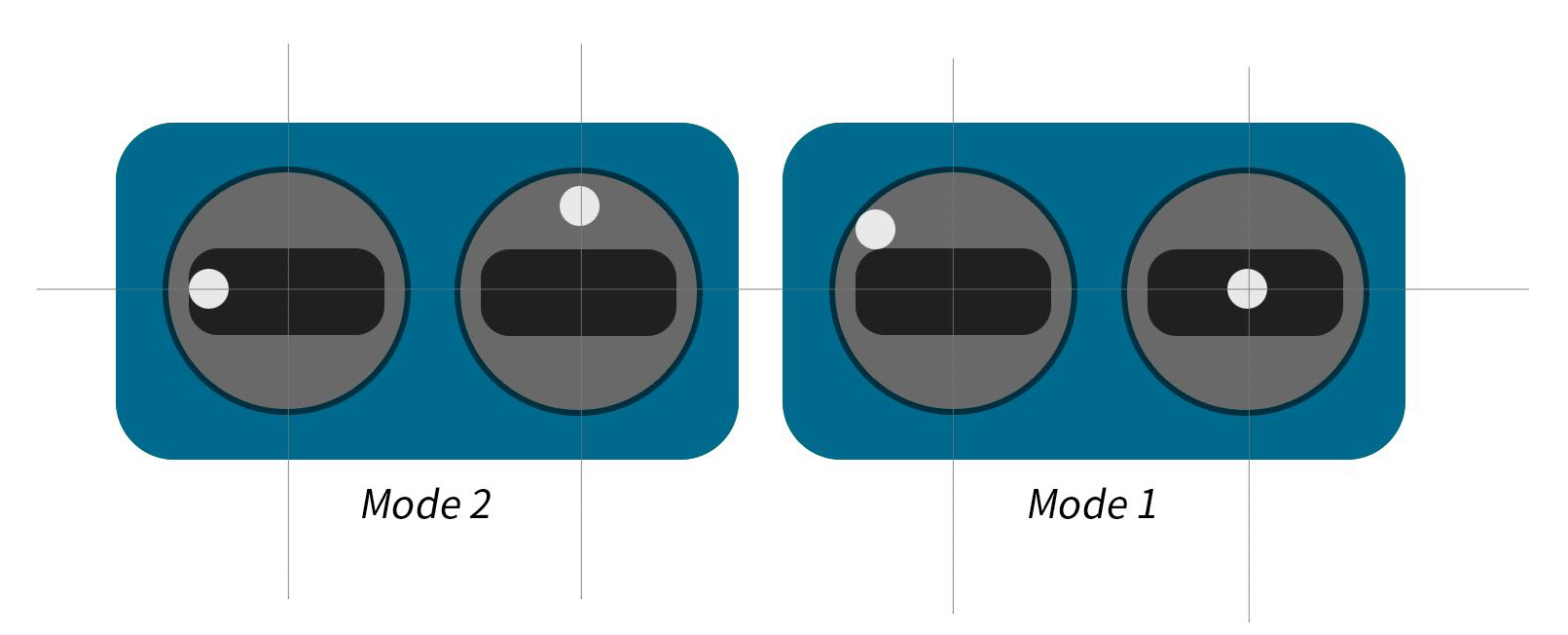
De stick input die je kunt geven om in het OSD menu je PID's te kunnen aanpassen.
Een current sensor is niet aanwezig op de vluchtcontroller, hierdoor kun je niet de gebruikte ampères zien. Dit is zeker vanwege de prijs voor mij een minpunt. Een ander minpunt is dat er niet gebruik gemaakt word van SmartAudio. Hierdoor kun je via het menu eigenlijk alleen maar PID's aanpassen en dus niet je videofrequentie.
Videozender
Voor de videozender geld hetzelfde als de vluchtcontroller, je klikt hem er zo op. Het enige wat er vervolgens nog gedaan moet worden, is het vastdraaien van de stack met de meegeleverde nylon moeren.
De VTX heeft een uFl/Ipex aansluiting waarop je vrij eenvoudig een antenne klikt. De VTX kent vier standen namelijk helemaal uit, 25mW, 100mW of 200mW. Met name de helemaal uit stand vind ik erg fijn. Op deze manier kun je LOS vliegen zonder stroom te verliezen aan je VTX.
Zoals eerder geschreven is het wel jammer dat je met het OSD niet de videofrequentie, band en zendsterkte kunt instellen. Je bent volledig afhankelijk van een knopje en knipperende LED's.
Ontvanger
Laurens van Duijn is een dronepiloot die met regelmaat in het sportpaleis hier in Alkmaar vliegt. Recent is hij over gestapt op een FrSky Taranis X9D en ik kreeg van hem, zomaar en voor niets, een Spektrum SPM4648 ontvanger. Dank je wel daarvoor Laurens!
Normaliter gebruik ik de ontvangers van Redcon met een bind button. Deze ontvangers hebben alleen af fabriek erg korte antennes. Door deze korte antennes vermoed ik dat ik sneller fail safes heb.
Wanneer je het originele model volgt, plaats je de ontvanger via een plastic plaatje boven de VTX. Omdat ik een iets andere aanpak heb gebruikt, past dit niet en plak ik de ontvanger met dubbelzijdig tape vast op de VTX. Ook heb ik de ontvanger uit de behuizing gehaald en voorzien van krimpkous. Op deze manier spaar ik weer wat ruimte uit.
Rolkooi
De rolkooi voordat deze in elkaar zit.
De rolkooi lijkt qua kleur op titanium, maar het is aluminium van een kwaliteit wat ook in de luchtvaart gebruikt wordt. De kooi is ook in roze en groen beschikbaar. De kooi zelf bestaat uit twee aluminium stukken die aan elkaar worden verbonden via een drietal stand-offs. Tussen de twee aluminium stukken worden ook een ledstrip en een carbonplaatje met ruimte voor alle antennes geplaatst.
In eerste instantie is het even puzzelen op welke manier je de LED strip monteert en soldeert. Dit vanwege de beperkte ruimte.
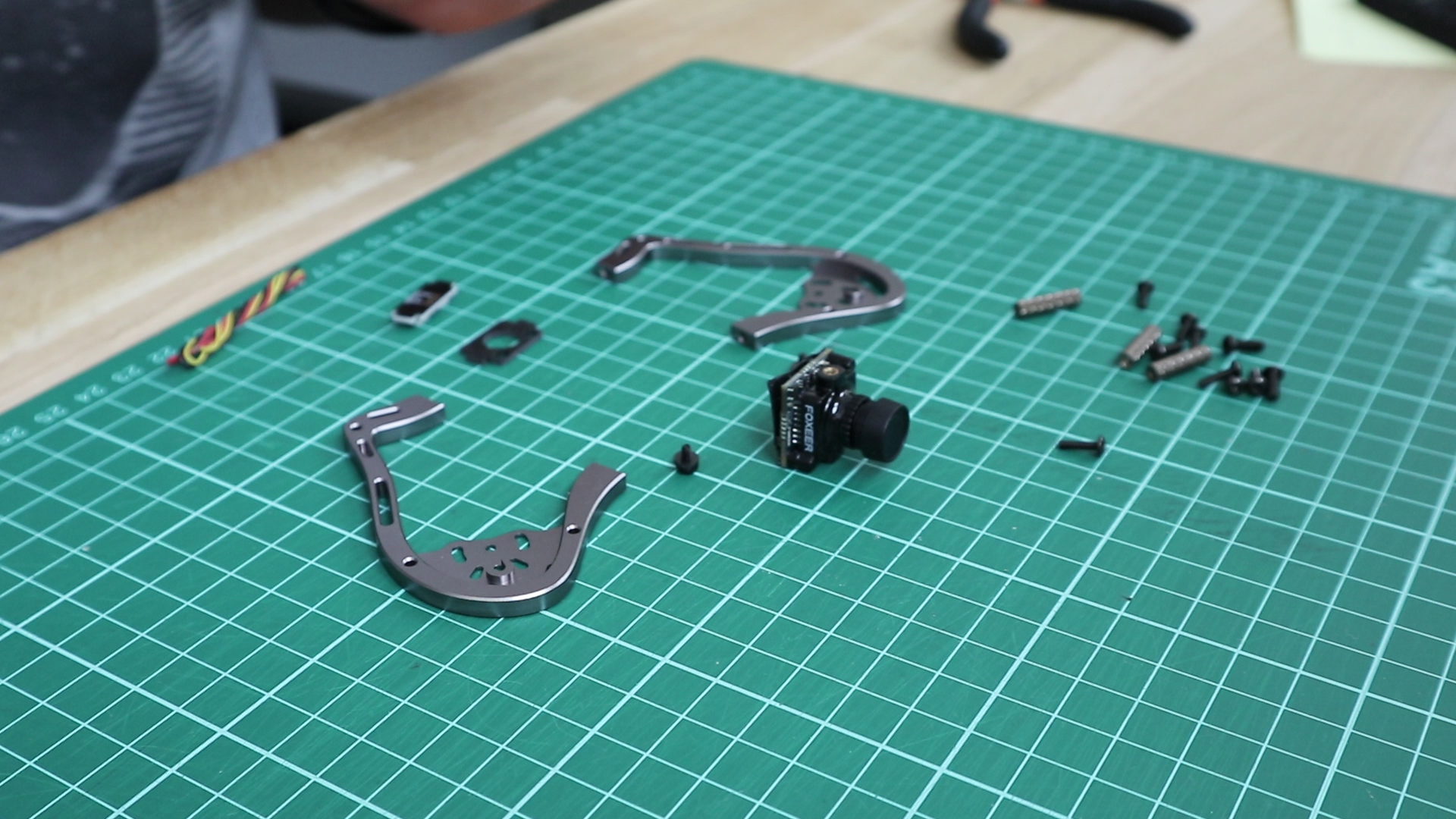
Foxeer Arrow Micro Pro FPV camera

Vooraanzicht met de Foxeer FPV camera.
Wat verder essentieel is, is natuurlijk de FPV camera. Met deze camera kun je vliegen vanuit het perspectief van de drone. Zelf heb ik gekozen voor de Foxeer Arrow Micro Pro, dit eigenlijk voornamelijk vanuit kosten oogpunt. Ik heb deze camera voor nog geen twintig Euro kunnen kopen.
De camera heeft een ook OSD, wat staat voor On Screen Display, en laat je het Voltage en de vluchttijd zien. Ook kun je je pilotennaam in het scherm plaatsen. Dit is vooral handig wanneer je mee doet aan een race en alle piloten vrijwel hetzelfde zien voor de start. Je kan dan makkelijk aan de hand van de je schermnaam je eigen drone herkennen. Omdat het OSD van de vluchtcontroller uitgebreider is, kies ik ervoor om met dat OSD te werken.
Verder kan de camera een Voltage aan tussen de vijf en veertig Volt. Er zit een 2.1mm IR-block lens op en werkt met 600 CCD televisielijnen.
De camera klemt met gemak tussen de aluminium beugels van de rolkooi. In de rolkooi zelf, zitten zelfs verdikkingen waardoor de camera supergoed in het frame past. Ook een grotere camera zoals een normale Runcam Swift zou moeten passen. Alleen denk ik dan dat je met de hoogte van de stack in de problemen kunt komen.
GoPro en de rolkooi

Een GoPro Session past verrassend goed!
In de rolkooi zitten aan de bovenzijde nog twee gleuven. Hierdoor kun je een batterystrap halen en een GoPro Session vast maken. Tenminste, hier lijkt het op. Na de eerste 3S testvlucht weet ik vrijwel zeker dat je een GoPro kan tillen met de Sparrow, maar dan moet je wel gebruik maken van een 4S lipo.
GEPRC Stable stack connectors
De connectoren van de Stable fly tower stack zijn niet standaard.
De Stable stack maakt gebruik van bijzondere connectoren. Wel worden er allerlei verloopkabeltjes meegeleverd, echter heb ik deze moeten verknippen en aan elkaar moeten solderen.
De kabel voor de DSMX ontvanger was trouwens verkeerd om gemonteerd aan de kant van de ontvanger. De juist volgorde moet rood, zwart grijs/wit zijn.
Rolkooi en frame aan elkaar verbinden
Oké dan! Alle onderdelen zijn gemonteerd en alle nodige kabeltjes zijn aangepast. Tijd om het frame te verbinden met de rolkooi. De rolkooi zit aan het frame vast met slechts vier schroeven.
Met beleid steek je de antennes door de daarvoor bestemde openingen in het carbon plaatje. Ook klik je de connectoren van de LED strip en de camera vast in de daarvoor bestemde poorten.
Zelf heb ik er voor gekozen om de VTX antenne ook met krimpkous te verstevigen en de antenne klem te zetten. Op deze manier komt de antenne niet in de propellers terecht.
Ook zijn er twee hardplastic tubes meegeleverd welke je om de antennes van de ontvanger kunt steken. Dit natuurlijk ter bescherming van de snel draaiende propellers. Ik heb met lijm aan de binnenzijde van het frame de twee tubes vastgezet.
Instellen in BetaFlight configurator
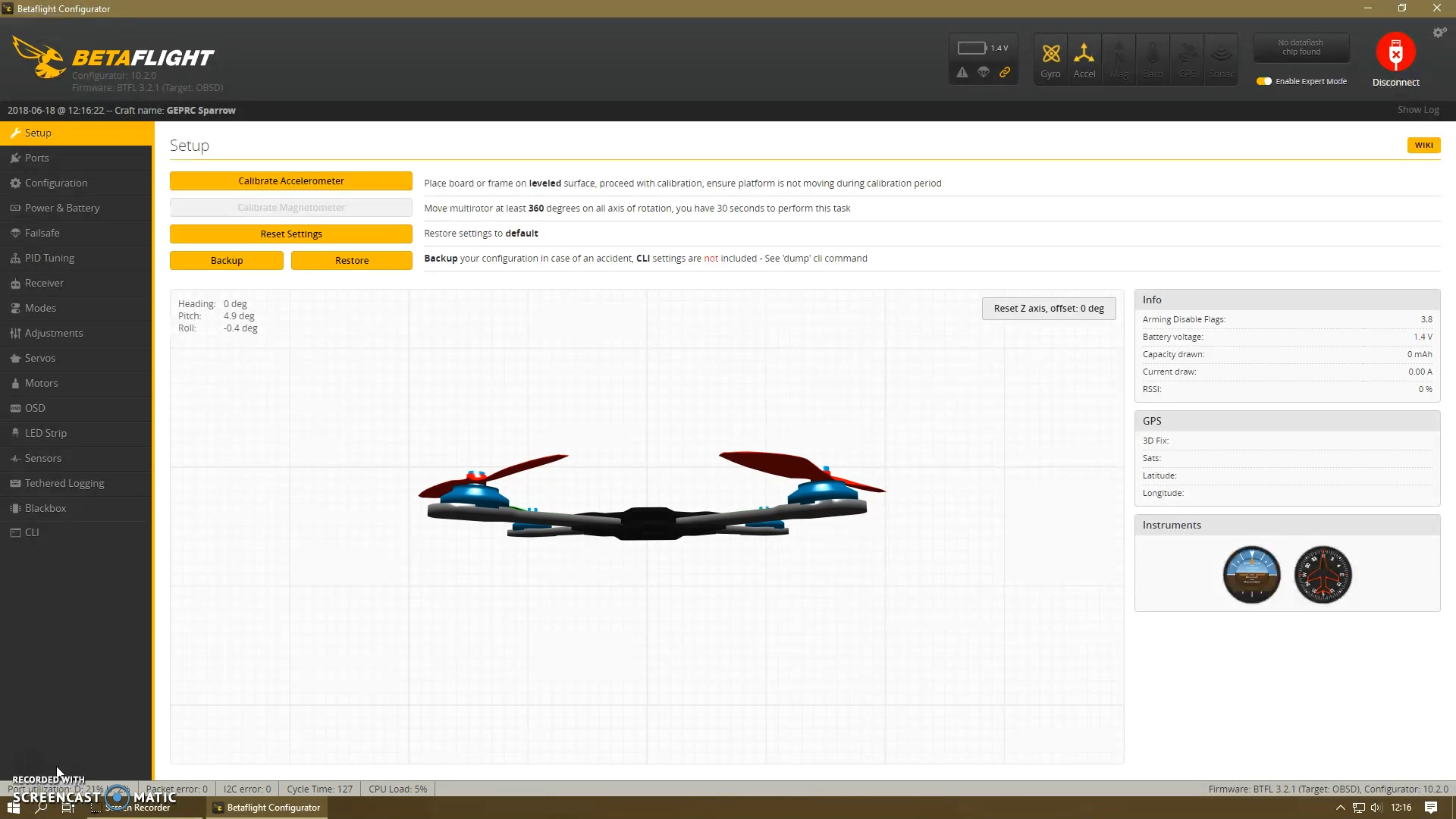
De eerste pagina binnen BetaFlight.
Wauw! Alles zit, met uitzondering van de propellers, in elkaar! En ik moet zeggen wat een pracht van een quadcopter. Er is in geen geval teveel gebruik gemaakt van kabels en mede dankzij het gebruikte mesh wire ziet het geheel er super strak uit.
Voordat ik deze quadcopter kan gaan vliegen is het natuurlijk zaak om deze in te stellen. Let er op dat je dit zonder propellers doet.
Ports
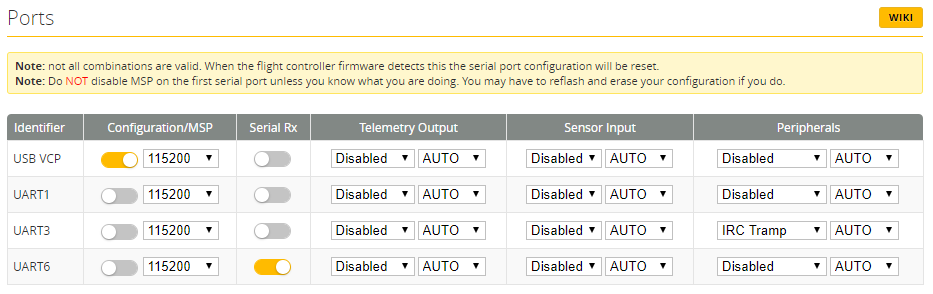
Bij UART6 Serial RX aan zetten.
Allereerst openen we het tabblad Ports. Hier stellen we bij UART6 in dat het een Serial RX betreft. Eigenlijk zeggen we hiermee tegen de flight controller dat de input via dit kanaal, het signaal van de ontvanger is. UART3 drie maakt het mogelijk om je PID's via de OSD in te stellen.
Configuration
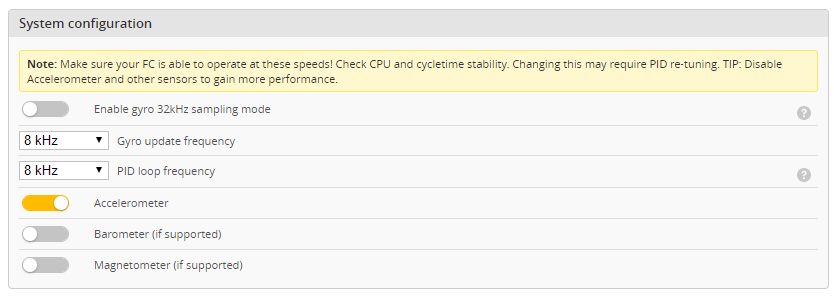
In het tabblad Configuration stellen we veel dingen in. We beginnen met het aanpassen van de PID loop. Normaliter staat deze op 2kHz, wat voldoende zou moeten zijn. Zelf heb ik deze op 8kHz ingesteld. Standaard staat ook de barometer aan, maar het bord heeft geen barometer. Zet deze daarom uit. De accelerometer laat ik bij nieuwe modellen vaak nog even aan staan. Dit geeft de mogelijkheid om in stabilisatiemodus te vliegen.
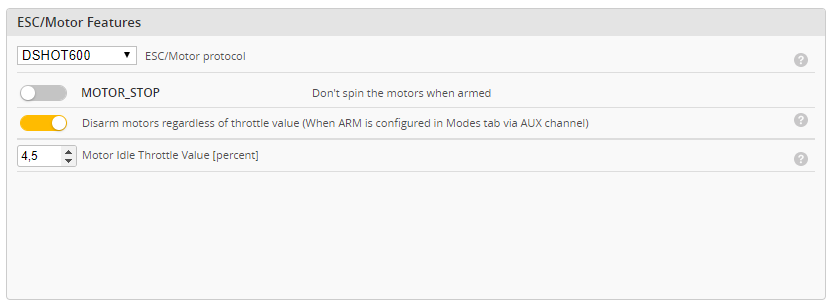
Qua ESC en motormogelijkheden heb ik niets aangepast. Graag maak ik gebruik van Dshot omdat dit qua instellen van de motoren eenvoudiger is. Ook heeft het als voordeel om flip over crash mode te gebruiken. Dit gebruik je wanneer je op de kop bent terecht gekomen, en de drone weer goed wilt zetten.

In het tabblad Ports hebben we zojuist aangegeven waar de ontvanger is aangesloten. Onder het kopje receiver (ontvanger) geven we aan met wat voor receiver we te maken hebben. Zelf maak ik gebruik van een Spektrum satellite met Spektrum2048.
Verder zet ik op dit tabblad bij het kopje Other features de opties LED_STRIP, AIRMODE, OSD en DYNAMIC_FILTER aan. Alle overige features staan uit.
Ondanks ik geen beeper op deze quadcopter heb zitten, laat ik de meeste instellingen wel aanstaan. Ik weet namelijk dat je met Dshot je motoren ook als beeper kunt gebruiken, maar niet of je deze functies allemaal kunt gebruiken.
Power & Battery
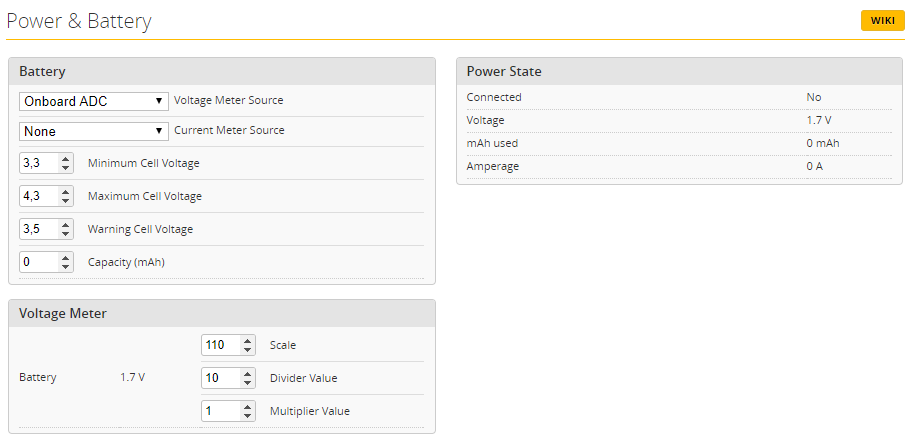
Van te voren had ik verwacht dat er een currentsensor op de flight controller zou zitten. Dit blijkt echter niet zo te zijn. Hierom heb ik in het kopje battery, van het tabblad Power & Battery, de Current Meter Source op None gezet. Verder heb ik hier nog niets gedaan. Eigenlijk moet ik nog wel controleren of de voltage meter klopt. Normaal gesproken doe ik dit door een lipo aan de quadcopter te verbinden en aan de lipo ook een voltage meter te bevestigen. Hierbij is de voltage meter leidend en stel ik de Scale hierop af tot dat de waarden gelijk zijn.
PID Tuning
Tot voor kort snapte ik niet het verschil tussen PID's en rates. Inmiddels wel, PID's bepalen hoeveel correctie er op de verschillende assen (m.u.v. throttle) wordt uitgevoerd. Wanneer je de juiste PID's voor een quad hebt gevonden, zijn de vliegeigenschappen perfect.
Rates daarentegen bepalen hoe je stick input word vertaald naar een beweging. Zo kun je met rates bijvoorbeeld de snelheid aanpassen waarmee de drone om zijn assen draait. Het instellen van rates zijn puur persoonlijk en ook wel afhankelijk van waar je vliegt.
Receiver
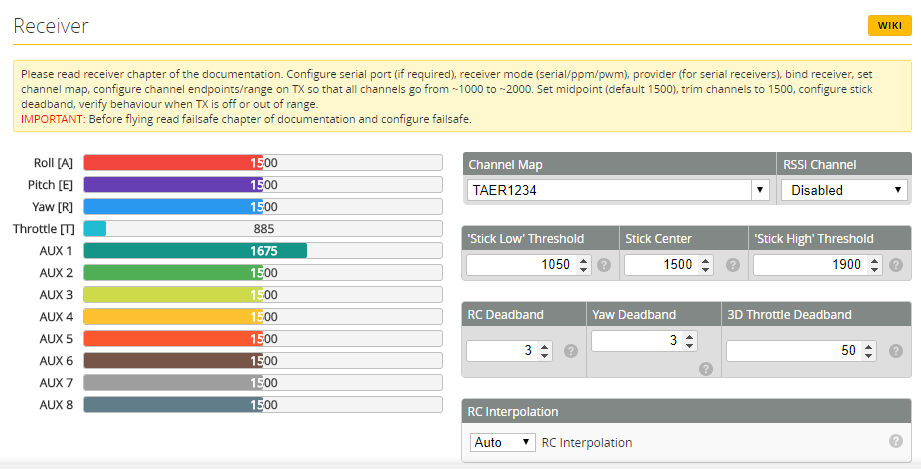
Als laatste onderdeel van het instellen van de zender, moet je in het tabblad Receiver (voor Spektrum) de Channel Map op TAER1234 instellen. Spektrum zenders en ontvangers tonen rondom het middenpunt van 1500 altijd wat fluctuatie. Daarom voeg ik altijd wat Deadband toe. In dit geval stonden de gekleurde balken met drie deadband allemaal stil.
Modes
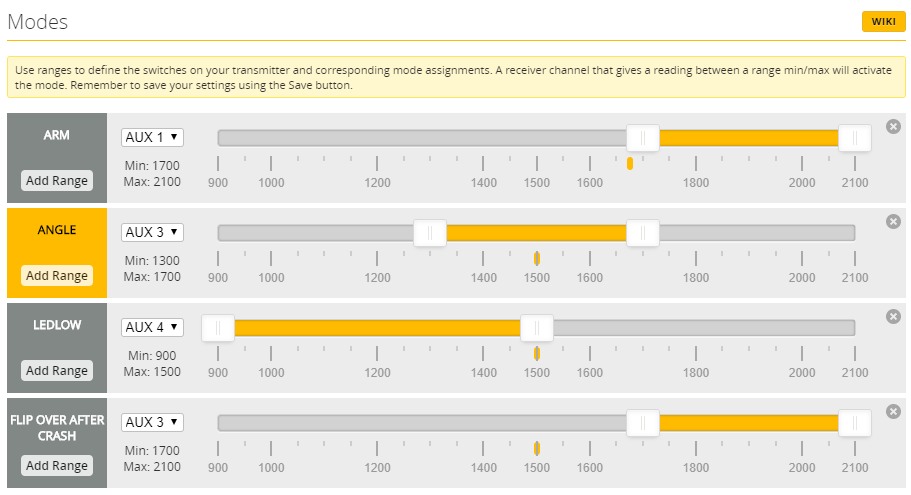
Naast de normale besturing van je quadcopter (throttle, pitch, roll & yaw) kun je extra functionaliteit en of mogelijkheden aan je zender toevoegen. Dit doe je in het tabblad Modes. Zo vind ik het fijn om een quadcopter altijd aan of uit te kunnen zetten met een schakelaar op mijn zender. Om dit te bereiken selecteer ik bij ARM de juiste schakelaar, en geef aan tussen welke waarden ik de quadcopter aan wil hebben.
Zo doe ik dit ook voor ANGLE, LEDLOW en FLIP OVER AFTER CRASH. Met Angle geef ik aan dat ik stabilisatie wil inschakelen. Ik vind het leuk om de ledverlichting aan en uit te kunnen zetten. Hierbij vind ik het fijn om voor het vliegen de leds, net als in een auto, aan te moeten zetten.
Flip over after crash is een modus die je kunt gebruiken wanneer je bent neergestort en op de kop ligt. Eerst schakel je je drone uit (ARM), vervolgens activeer je FOAC mode, daarna schakel je je drone met ARM weer aan. Met deze werkwijze kun je aangeven welke motoren je omgekeerd wilt laten draaien. Logischerwijs zijn dit altijd de vrije motoren (waarbij de propellers vrij kunnen draaien).
Adjustments
In het tabblad PID Tuning kun je meerdere Rate profielen maken. Dit is handig wanneer je bijvoorbeeld binnen rustiger wilt vliegen dan buiten. Wanneer je snel wilt schakelen tussen de verschillende profielen, kun je in het tabblad Adjustments een switch toekennen aan het kiezen van rate profielen.
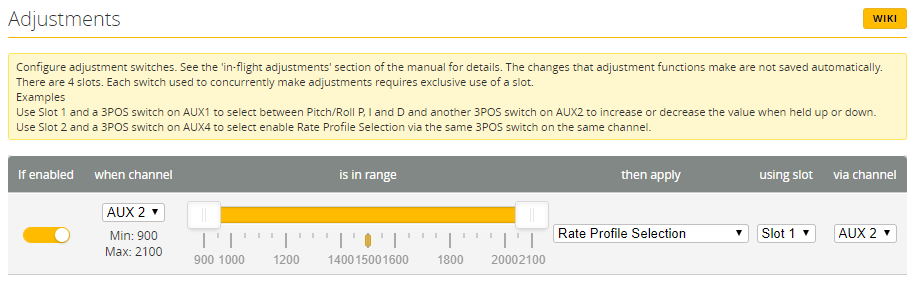
Hierboven zie je dat ik mijn switch (schakelaar) op AUX2 heb ingesteld om tussen de drie mogelijk rate profielen te schakelen.
OSD
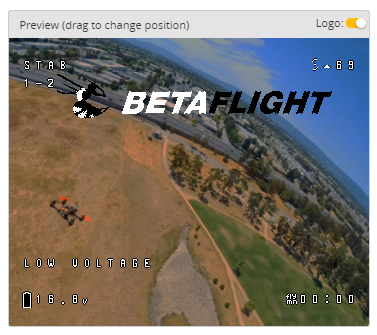
Wanneer ik vlieg, zie ik graag informatie. En de afbeelding hierboven geeft aan wat ik eigenlijk voor al mijn quadcopters heb ingesteld. Ik wil weten in welke vluchtmodus ik me bevind en welke profielen geselecteerd zijn (linksboven). Rechtsboven zie je de positie van mijn throttle stick, hierbij is 0 geen input en 100 volledige input.
Linksonder worden alle meldingen getoond en zie je het voltage van de lipo. Rechtsonder wordt de tijd weergegeven vanaf het moment dat ik de quadcopter heb ingeschakeld met de ARM switch.
Normaliter staat er midden onder ook de current draw en total current drawn. Maar omdat de vluchtregelaar niet over een current sensor beschikt is het niet mogelijk om deze informatie te tonen.
LED Strips
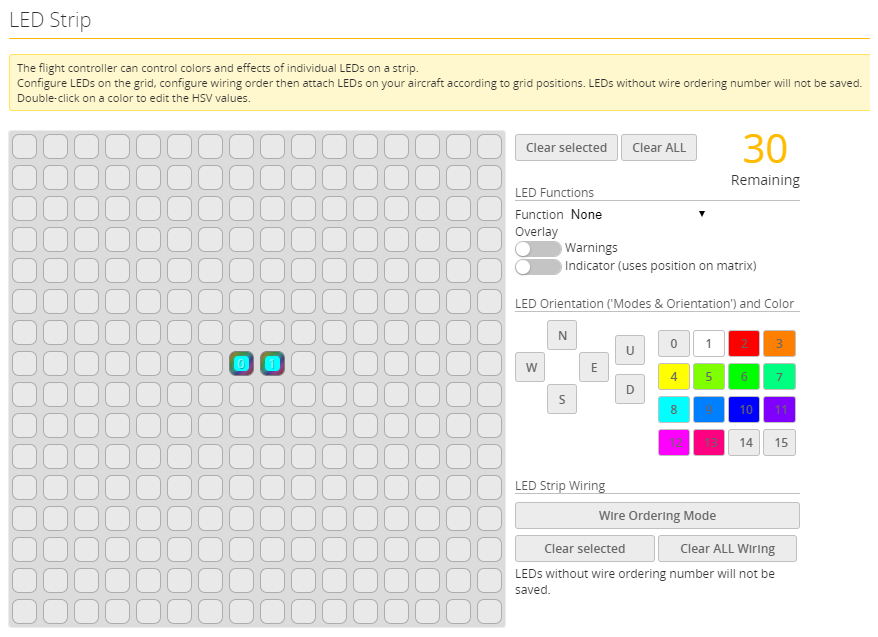
Met LED strips kun je in BetaFlight heel veel doen. Zelf gebruik ik het alleen maar voor verlichting. Standaard stonden er vier LED's ingesteld terwijl we er maar twee hebben. De kleur van de LED's matcht mooi met de turquoise propellers.
Blackbox
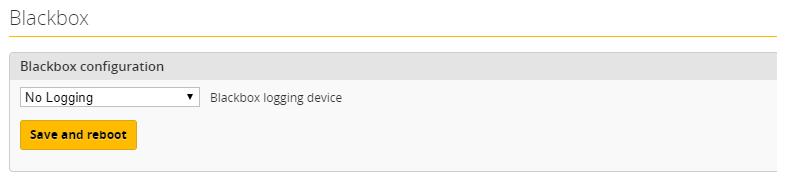
Met blackbox kun je, mits er geheugen beschikbaar is in de vorm van RAM of een SD-kaart, de gegevens van sensoren opslaan. Met deze gegevens kun je vervolgens gegevens van verschillende sensoren opslaan.
Zelf kies ik er voor om geen log aan te leggen, dit om de simpele reden dat er geen geheugen beschikbaar is.
Motoren en zender instellen
Inmiddels zijn we door alle instellingen in BetaFlight gelopen. Het enige wat nu nog rest is zien of de motoren de juiste kant op draaien en controleren of de zender werkt. In het tabblad Motors is het mogelijk om iedere motor zacht en afzonderlijk te laten draaien. Wel moet je hiervoor eerst een lipo aansluiten, spannend!
Zodra je de ontvanger van stroom voorziet (via lipo) gaat de oranje LED knipperen. Dit betekend dat de ontvanger klaar is om te koppelen aan een zender. Ik heb een nieuw profiel aangemaakt op mijn zender en deze vervolgens gekoppeld. Bij mij was er dus geen rook.
Motoren twee en drie draaiden verkeerd om. Gelukkig is dit geen ingewikkeld probleem, software matig kun je de motoren de andere kant op laten draaien. Hiervoor maak ik gebruik van de Google Chrome app BLHeli configurator.
BLHeli configurator
Google heeft aangegeven dat ze stoppen met het ondersteunen van apps in Chrome webbrowser. Ik geloof dat Joshua Bardwell al een video heeft gemaakt waarin de configurator als een native software draait. Vooralsnog werkt het bij mij prima.
Wat je na het verbinden met de configurator wilt doen is motoren twee en drie op "reversed" zetten. Hiermee geef je aan dat de motoren de andere kant op moeten draaien. Wanneer je gebruik van Dshot maakt moet je de waarden van alle motoren op 1000 en 2000 zetten.
Verder kun je er voor kiezen om de allernieuwste firmware voor de ESC's te installeren (flashen).
Propellers en de eerste testvlucht

Klaar voor de "eerste" LOS testvlucht. Bij de echte eerste vlucht was mijn GoPro camera leeg.
Alles is ingesteld, lipo's zijn geladen en de propellers zijn gemonteerd. De GEPRC MX3 Sparrow is klaar voor de eerste testvlucht! Helaas heb ik bij de echte eerste vlucht niet in de gaten gehad, dat de accu leeg was.
Onderdelen

Daar gaat ze... De GEPRC MX3 sparrow op naar een tijd vol FPV!
Wil je deze MX3 Sparrow quadcopter exact nabouwen? Dat kan! De volgende onderdelen heb ikzelf gebruikt. Houd er wel rekening mee dat je ook de juiste apparatuur en materialen tot je beschikking hebt zoals een soldeerbout, soldeer en draad.
- GEPRC GEP-MX3 Sparrow frame
- BrotherHobby Tornado 1407-3600kV motoren
- GEPRC Stable 20A all in one stack (FC+ESC+VTX)
- Spektrum SPM4648 DSMX Satellite receiver
- Foxeer Arrow Micro Pro FPV camera
- GEPRC 3042x3 propellers
- GEPRC 20x20mm plastic plaatjes
- Wire mesh draadbescherming
- Nanotech 850mAh 3S 45C Lipo
Je kan deze GEPRC MX3 drone ook kant en klaar kopen via bijvoorbeeld BangGood.